




Autopilot
In letzter Zeit stehen Autopilot-Systeme auch für Flugmodelle zur Verfügung. Einfache Kommandos wie die Wahl der Betriebsart werden dem Autopilot über freie Kanäle der RC-Anlage übermittelt; um alle Möglichkeiten im Flug auszuschöpfen (z. B. die Live-Darstellung von Position und Kurs auf einer Karte), benötigt man eine bidirektionale Verbindung zwischen dem Autopilot und einem Computer am Boden über ein Data Radio.
Ein Autopilot im Flugmodell kann verschiedene Aufgaben übernehmen. Gerade für die Aufnahme von Onboard-Flugvideos und Luftaufnahmen ist es wichtig, dass das Flugzeug eine möglichst ruhige Fluglage hat. Ein Autopilot wird häufig dazu eingesetzt, die Fluglage zu stabilisieren, also das Flugmodell unabhängig von Wind und Flugmanövern immer möglichst ruhig in horizontaler Lage zu halten. Wenn man keine Steuerbefehle gibt, fliegt das Modell immer stabil geradeaus. Bei kritischen Flugsituationen kann der Autopilot das Flugmodell abfangen, man muss dazu nur die Steuerknüppel loslassen. Eine weitere wichtige Funktion ist return to home (RTH). Der Autopilot speichert die Position beim Start, und wenn man über die Fernsteuerung das RTH-Kommando gibt, kehrt das Modell wieder zum Startplatz zurück und kreist dort in stabiler Höhe. Falls man also das Flugmodell einmal aus den Augen verliert, kann der Autopilot es mittels RTH wieder zurückbringen. Außerdem kann man bei vielen Autopiloten einen Kurs aus Wegpunkten (waypoints) programmieren, den das Modell abfliegt.
Im folgenden Bild drei Autopilot-Generationen des Herstellers Feiyu Tech: FY-21AP, FY-31AP und FY-41AP.

Seit April 2013 ist der aktuelle Autopilot FY-41AP erhältlich, seit März 2014 gibt es zusätzlich die günstigere Version FY-41AP Lite. Mehr Informationen zu diesen Autopiloten gibt es auf dieser Seite. Im folgenden Bild sieht man den FY-41AP mit GPS-Modul und Airspeed-Sensor:

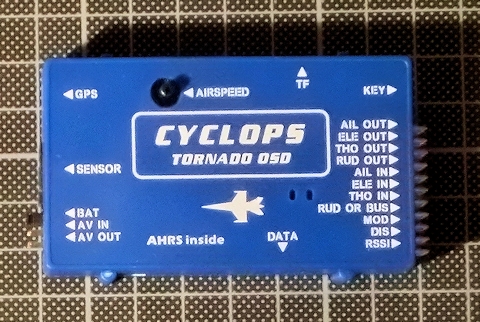
Ein anderer günstiger Autopilot ist das Tornado OSD von Cyclops, hier ein Bild; ausführliche Informationen zum Tornado OSD sind auf dieser Seite.
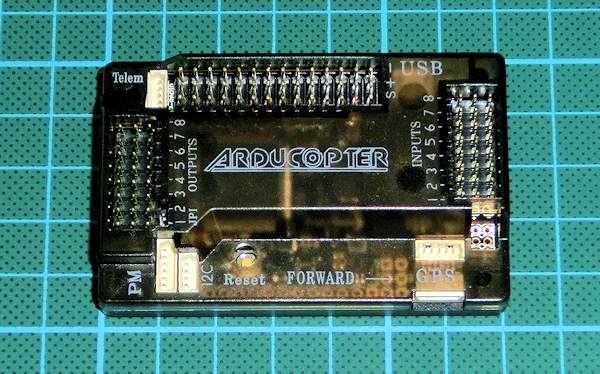
Ein sehr flexibles System ist der ArduPilotMega, kurz APM; das ist ein Open Source-Autopilot, für den es Firmware zum Einsatz in Flächenmodellen, Multicoptern, Fahrzeugen und mehr gibt. Seit 2013 gibt es das 32bit-Nachfolgemodell Pixhawk. Mehr Informationen zu APM und Pixhawk sind auf dieser Seite. Hier ein Bild des APM 2.6:
Ein komfortabler Autopilot für Flächenmodelle und Multicopter ist der Eagle Tree Vector, der u. a. eine farbige OSD-Anzeige bietet. Weitere Informationen zum Vector sind auf dieser Seite.

Eine günstige Alternative zur Gewährleistung einer ruhigen Fluglage sind reine Stabilisierungssysteme, die es mittlerweile sehr günstig zu kaufen gibt. Ein "Stabi" ermöglicht meist nur eine relative Bewegungsmessung über Gyro, keine absolute Bestimmung der Fluglage im Raum (über Akzelerometer). Dabei werden vom Stabi alle drei Achsen stabilisiert (z. B. bei Windböen), im Gegensatz zu den "ausgewachsenen" Autopiloten fehlen hier typischerweise Höhenmesser und GPS, und es gibt beispielsweise keine return-to-home-Funktion.
Neben den hier genannten Autopiloten für Flächenmodelle gibt es noch diverse andere, z. B. der Arkbird. Außerdem gibt es eine Vielzahl an Flugsteuerungen (FC = flight control) speziell für Multicopter wie z. B. DJI NAZA, KK-Board, Autoquad u. a.; einige Autopiloten können je nach eingesetzter Firmware sowohl Flächenmodelle als auch Multicopter steuern, z. B. Pixhawk.